
HOME»基本情報技術者平成29年秋期»午前 問4
基本情報技術者平成29年秋期 午前 問4
問4
図のような黒色で描かれた円に沿って車が走るように,左右の後輪に独立に取り付けられたモーターL及びRの回転速度を制御する。センサーL及びRは反射型光センサーであり,センサーが黒色に掛かる比率が大きいと出力値が小さくなり,黒色に掛かる比率が小さいと出力値が大きくなる。この車を円に沿って走行させるためのモーター回転速度の制御方法として,適切なものはどれか。ここで,二つのセンサーの出力値が一致するときには,二つのモーターの回転速度を初期値に戻すものとする。
※ダークモードでは画像の白黒が反転しています。問題文の黒色は白色と読み替えてください。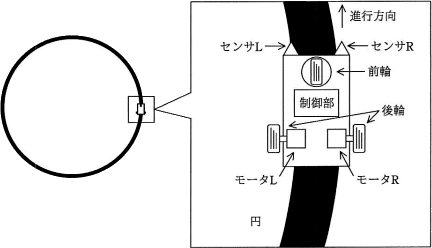
※ダークモードでは画像の白黒が反転しています。問題文の黒色は白色と読み替えてください。

分類 :
テクノロジ系 » 基礎理論 » 計測・制御に関する理論
正解 :
イ
解説 :
まず設問に係る条件を整理しておきます。
[センサーと出力値の関係]
センサーに掛かる黒色部分が大きくなる→出力値が減る
センサーに掛かる黒色部分が小さくなる→出力値が増える
[車の制御]
左方向に進行させる→左の回転を下げ、右の回転を上げる。
右方向に進行させる→左の回転を上げ、右の回転を下げる。
次に車が黒いラインから右にずれているケースと左にずれているケースの2つを考えます。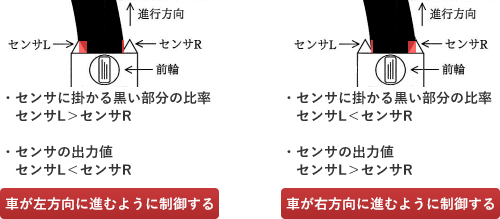 図の右のケースのようにセンサーの出力値がL>Rならば、車は黒いラインの左側に逸れています。このためモーターLの回転速度を上げ、モーターRでは下げることで、車が右方向に進むように制御します。反対に、図の左のケースのようにセンサーの出力値がL<Rならば、車は黒いラインの右側に逸れています。このためモーターLの回転速度を下げ、モーターRでは上げることで、車が左方向に進むように制御します。
図の右のケースのようにセンサーの出力値がL>Rならば、車は黒いラインの左側に逸れています。このためモーターLの回転速度を上げ、モーターRでは下げることで、車が右方向に進むように制御します。反対に、図の左のケースのようにセンサーの出力値がL<Rならば、車は黒いラインの右側に逸れています。このためモーターLの回転速度を下げ、モーターRでは上げることで、車が左方向に進むように制御します。
したがって正しい組合せは「イ」です。
[センサーと出力値の関係]
センサーに掛かる黒色部分が大きくなる→出力値が減る
センサーに掛かる黒色部分が小さくなる→出力値が増える
[車の制御]
左方向に進行させる→左の回転を下げ、右の回転を上げる。
右方向に進行させる→左の回転を上げ、右の回転を下げる。
次に車が黒いラインから右にずれているケースと左にずれているケースの2つを考えます。
したがって正しい組合せは「イ」です。